Animation du Volatile Polar Research Rover (VIPER) de la NASA à la surface de la Lune. Crédit : NASA Ames / Daniel Rutter
Comme tout voyageur aguerri le sait, pour tirer le meilleur parti d’une aventure, une bonne carte est utile. Ce n’est pas différent pour le premier rover robotique lunaire de la NASA qui devrait être livré sur la Lune à la fin de 2023 pour rechercher de la glace et d’autres ressources sur et sous la surface lunaire. Le Volatile Polar Exploration Research Rover, ou VIPER, fait partie du programme Artemis de l’agence. Sans guide de voyage sur la Lune, les planificateurs de mission VIPER créent de nouvelles cartes d’élévation numériques haute résolution de la surface lunaire.
Lorsqu’il est équipé de ces cartes, le rover sera dans une meilleure position pour traverser la Lune en toute sécurité et efficacement tout en recherchant des ressources au pôle Sud lunaire. La glace est une ressource d’un intérêt scientifique particulier, car elle peut avoir des applications si elle est trouvée dans l’espace et convertie en d’autres ressources pour promouvoir notre exploration du système solaire, comme l’oxygène et le carburant de fusée.
À une échelle d’environ trois pieds (un mètre), ces cartes fournissent un modèle 3D de grandes étendues de terrain au pôle Sud lunaire et montrent les conditions d’éclairage et de température en constante évolution causées par de longues ombres balayant le paysage.

Illustration du Volatile Polar Research Rover (VIPER) de la NASA à la surface de la Lune. Crédit : NASA Ames / Daniel Rutter
En plus d’empêcher le rover de basculer sur les bords des cratères escarpés, cette vue rapprochée de la surface de la Lune fournit aux planificateurs de mission des informations vitales pour s’assurer que les batteries solaires du rover sont maintenues chargées et guident le rover vers des endroits sûrs pour hiberner pendant la communication. pannes d’électricité avec les opérations de mission sur Terre.
“Nous envoyons VIPER dans l’un des environnements les plus dynamiques de la Lune, et le rover doit être capable de prendre ce que la Lune donne”, a déclaré Anthony Colaprete, scientifique du projet VIPER au centre de recherche Ames de la NASA dans la Silicon Valley en Californie. . “C’est pourquoi nous créons ces cartes uniques à l’échelle humaine pour nous aider à planifier soigneusement les itinéraires du rover tout en opérant en toute sécurité et en collectant la meilleure science possible.”
Les cartes révèlent déjà de nouvelles caractéristiques d’intérêt scientifique à la surface de la Lune, y compris de nombreux “mini pièges à froid”, qui sont des poches ombragées sur la surface lunaire de 6 à 16 pieds (2 à 5 mètres) de large, qui pourraient être suffisamment froides pour que la glace potentiellement s’accumuler. Ces micro pièges à froid offrent des zones à explorer en plus des cratères beaucoup plus profonds et plus anciens qui sont au centre de la mission VIPER.

Une vue oblique spectaculaire du bord du cratère Shackleton près du pôle Sud de la Lune. Le cratère a un diamètre d’environ 13 miles (21 kilomètres). Alors qu’aucun endroit sur la Lune n’est illuminé en permanence, trois points sur le bord sont illuminés collectivement pendant plus de 90 pour cent de l’année. Ces points sont entourés de dépressions topographiques qui ne reçoivent jamais la lumière du soleil, créant des pièges froids pouvant capturer la glace. La caméra à angle étroit à bord du Lunar Reconnaissance Orbiter de la NASA a pris cette photo le 1er août 2006. Crédit : NASA / GSFC / Arizona State University
“Nous avions l’habitude de penser à la glace d’eau qui ne s’accumulait que dans les cratères profonds et sombres de la Lune”, a déclaré Colaprete. « Mais maintenant, nous pensons que même les petits cratères ombragés peuvent être suffisamment froids pour retenir les molécules d’eau. Ces petits pièges à froid sont beaucoup plus courants que leurs homologues plus grands, il est donc important de comprendre comment ils peuvent stocker l’eau pour répondre à la question plus large du comportement de l’eau sur la Lune. »
Pour créer les cartes d’altitude, une équipe d’Ames utilise l’outil logiciel open source Stereo Pipeline de la NASA, ainsi que la puissance de traitement du supercalculateur Pleiades d’Ames pour superposer des milliers d’images satellites prises par les caméras à bord du navire Lunar Reconnaissance Orbiter.
Les ingénieurs combinent ces outils puissants et cette expertise avec une capacité de traitement photo appelée photoclinométrie. Cette technique, également connue sous le nom de « forme à partir de l’ombrage », combine les angles connus de la lumière solaire avec les niveaux de gris de nombreuses images bidimensionnelles pour déduire les formes tridimensionnelles de la surface lunaire. Le modèle résultant du terrain lunaire permet aux ingénieurs de calculer comment les lumières et les ombres sont reproduites sur la surface à tout moment dans le passé ou le futur. Par exemple, en utilisant le modèle, ils peuvent prédire l’éclairage quand et où le rover va atterrir, et planifier les mouvements du rover pour le garder au soleil et éviter les ombres.
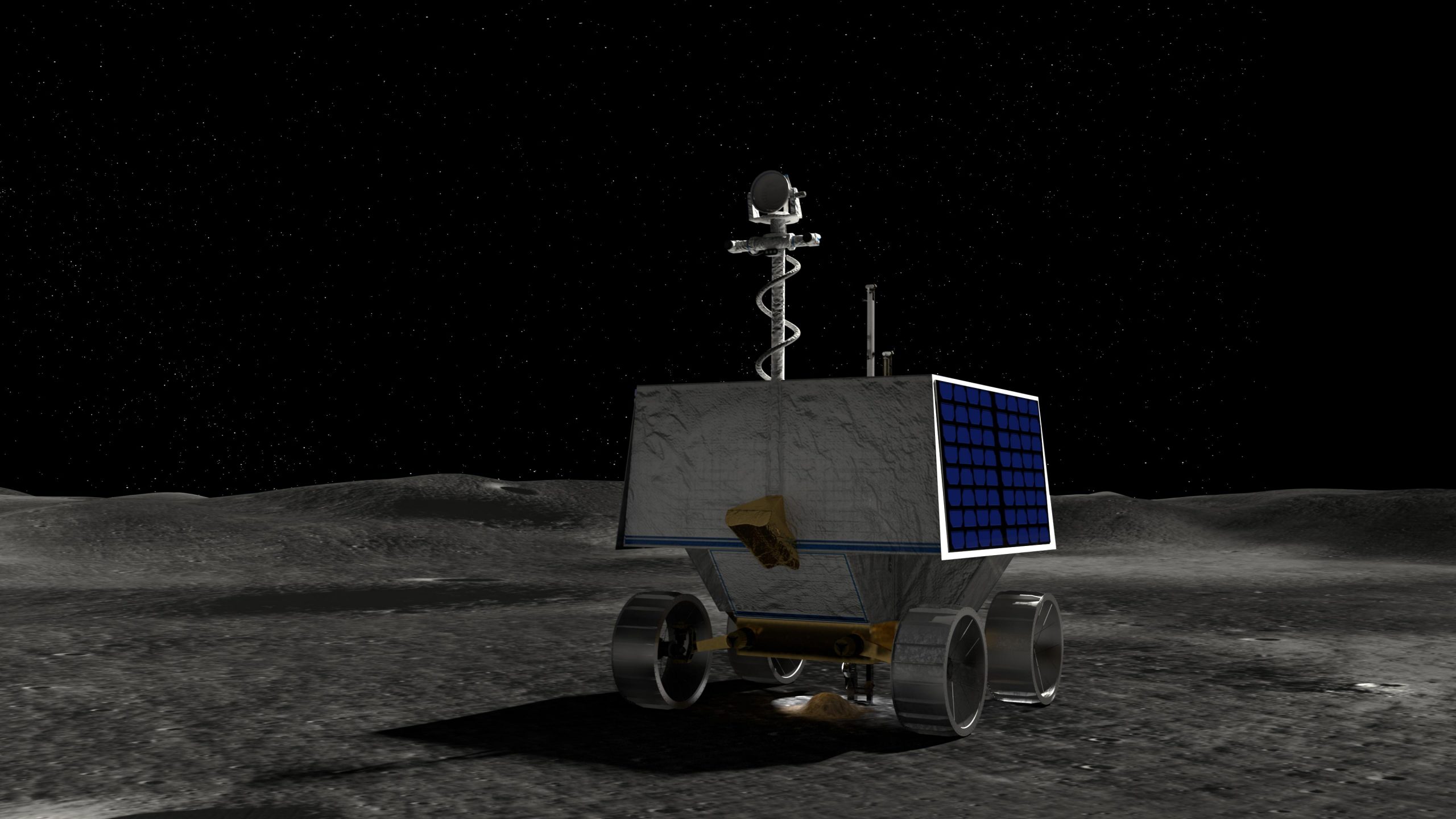
Illustration du Volatile Polar Research Rover (VIPER) de la NASA à la surface de la Lune. Crédit : NASA Ames / Daniel Rutter
Avec des conditions d’éclairage connues, l’équipe peut créer des cartes de température détaillées sur des terrains variés, en surface et jusqu’à un peu plus de 8 pieds (2,5 mètres) en dessous. Les températures peuvent varier considérablement de moins 400 degrés à 170 degrés Fahrenheit, faisant de la surface de la Lune un damier d’emplacements potentiellement prometteurs et hautement improbables pour détecter la glace. Équipée de ces nouvelles cartes, l’équipe peut choisir des emplacements où la glace pourrait être présente et envoyer VIPER pour afficher et vérifier la glace, et si c’est le cas, sa stabilité dans diverses conditions lunaires.
“Ces cartes haute résolution ont complètement changé notre façon de penser”, a déclaré Kimberly Ennico Smith, scientifique associée pour le projet VIPER à Ames. « Nous commençons à voir à quel point les conditions au sol sont extrêmement variées sur la Lune, même dans des zones que nous pensions autrefois assez uniformes. Cela nous permettra d’identifier beaucoup plus précisément les sites de forage du rover et nous amènera à collecter des données scientifiques encore meilleures. »
Les membres de l’équipe VIPER chargés de faire fonctionner le rover ont un vif intérêt à voir à quoi le rover va faire face jour après jour, ou plutôt minute par minute.
“Les ombres se déplacent autour du pôle Sud de la Lune à peu près à la même vitesse que le rover conduit”, a déclaré Mark Shirley, responsable de la planification des opérations de mission chez Ames. “Nous devons planifier à l’avance pour éviter que VIPER ne soit rattrapé par l’obscurité; il n’y a pas beaucoup de place à l’erreur.”

“Introverti. Amateur de bière extrême. Organisateur subtilement charmant. Explorateur d’une humilité exaspérante. Écrivain indépendant.”