
Par

Le booster New Shepard (NS) atterrit après le cinquième vol de ce véhicule pendant le NS-11 le 2 mai 2019. Crédit: Blue Origin
Certains des endroits les plus intéressants à étudier dans notre système solaire se trouvent dans les environnements les plus inhospitaliers – mais atterrir sur n’importe quel corps planétaire est déjà une proposition risquée. Avec NASA planifier des missions robotiques et avec équipage vers de nouveaux endroits sur la Lune et Mars, éviter d’atterrir sur la pente raide d’un cratère ou dans un champ de blocs est essentiel pour assurer un atterrissage en toute sécurité pour l’exploration de surface d’autres mondes. Afin d’améliorer la sécurité à l’atterrissage, la NASA développe et teste une suite de technologies précises d’atterrissage et d’évitement des dangers.
Une combinaison de capteurs laser, d’une caméra, d’un ordinateur à grande vitesse et d’algorithmes sophistiqués donnera au vaisseau spatial les yeux artificiels et la capacité analytique pour trouver une zone d’atterrissage désignée, identifier les dangers potentiels et ajuster la route vers le site de toucher des roues le plus sûr. Les technologies développées dans le cadre du projet Safe and Precise Landing – Integrated Capabilities Evolution (SPLICE) dans le cadre du programme de développement de changement de jeu de la Direction des missions de technologie spatiale permettront à terme aux engins spatiaux d’éviter les rochers, les cratères et plus encore dans les zones d’atterrissage de la moitié de la taille d’un terrain de football déjà ciblé comme relativement sûr.
Une nouvelle suite de technologies d’atterrissage lunaire, appelée Safe and Precise Landing – Integrated Capabilities Evolution (SPLICE), permettra des atterrissages lunaires plus sûrs et plus précis que jamais. Les missions futures de la Lune pourraient utiliser les algorithmes et capteurs SPLICE avancés de la NASA pour cibler des sites d’atterrissage qui n’étaient pas possibles pendant les missions Apollo, comme les régions avec des rochers dangereux et des cratères ombragés à proximité. Les technologies SPLICE pourraient également aider à atterrir des humains sur Mars. Crédit: NASA
Trois des quatre principaux sous-systèmes de SPLICE effectueront leur premier vol d’essai intégré sur une fusée Blue Origin New Shepard lors d’une prochaine mission. Lorsque le propulseur de la fusée revient au sol, après avoir atteint la frontière entre l’atmosphère terrestre et l’espace, la navigation relative du terrain de SPLICE, le lidar Doppler de navigation et l’ordinateur de descente et d’atterrissage fonctionneront à bord du propulseur. Chacun fonctionnera de la même manière qu’il le fera à l’approche de la surface de la Lune.
Le quatrième composant SPLICE majeur, un lidar de détection des dangers, sera testé à l’avenir via des tests au sol et en vol.
Suivre le fil d’Ariane
Lorsqu’un site est choisi pour l’exploration, une partie de la considération est de garantir suffisamment d’espace pour qu’un vaisseau spatial puisse atterrir. La taille de la zone, appelée ellipse d’atterrissage, révèle la nature inexacte de la technologie d’atterrissage héritée. La zone d’atterrissage ciblée pour Apollo 11 en 1968 était d’environ 11 milles sur 3 milles, et les astronautes ont piloté l’atterrisseur. Les missions robotiques ultérieures sur Mars ont été conçues pour des atterrissages autonomes. Viking est arrivé sur la planète rouge 10 ans plus tard avec une ellipse cible de 174 miles par 62 miles.
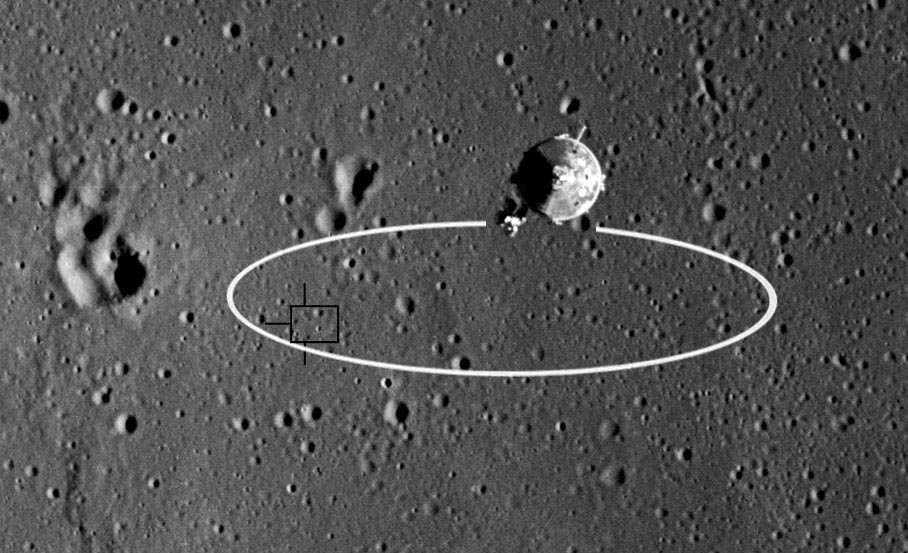
L’ellipse d’atterrissage d’Apollo 11, illustrée ici, mesurait 11 milles sur 3 milles. La technologie d’atterrissage de précision réduira considérablement la zone d’atterrissage, permettant à plusieurs missions d’atterrir dans la même région. Crédit: NASA
La technologie s’est améliorée et les zones d’atterrissage autonomes subséquentes ont diminué de taille. En 2012, l’ellipse d’atterrissage du rover Curiosity était réduite à 12 milles sur 4 milles.
Être en mesure de localiser un site d’atterrissage aidera les futures missions à cibler des zones pour de nouvelles explorations scientifiques dans des endroits auparavant jugés trop dangereux pour un atterrissage sans pilote. Cela permettra également aux missions d’approvisionnement avancées d’envoyer des marchandises et des fournitures à un seul endroit, plutôt que de s’étaler sur des kilomètres.
Chaque corps planétaire a ses propres conditions uniques. C’est pourquoi «SPLICE est conçu pour s’intégrer à tout vaisseau spatial atterrissant sur une planète ou une lune», a déclaré le chef de projet Ron Sostaric. Basé au Johnson Space Center de la NASA à Houston, Sostaric a expliqué que le projet s’étendait sur plusieurs centres de l’agence.
La navigation relative au terrain fournit une mesure de navigation en comparant des images en temps réel à des cartes connues des caractéristiques de surface pendant la descente. Crédit: NASA
«Ce que nous construisons est un système complet de descente et d’atterrissage qui fonctionnera pour les futures missions Artemis sur la Lune et pourra être adapté pour Mars», a-t-il déclaré. «Notre travail consiste à assembler les composants individuels et à nous assurer qu’il fonctionne comme un système fonctionnel.»
Les conditions atmosphériques peuvent varier, mais le processus de descente et d’atterrissage est le même. L’ordinateur SPLICE est programmé pour activer la navigation relative au terrain à plusieurs kilomètres au-dessus du sol. La caméra embarquée photographie la surface, prenant jusqu’à 10 photos par seconde. Celles-ci sont continuellement introduites dans l’ordinateur, qui est préchargé avec des images satellite du terrain d’atterrissage et une base de données de points de repère connus.
Les algorithmes recherchent dans les images en temps réel les caractéristiques connues pour déterminer l’emplacement de l’engin spatial et diriger l’engin en toute sécurité jusqu’à son point d’atterrissage prévu. C’est similaire à la navigation via des points de repère, comme des bâtiments, plutôt que des noms de rues.
De la même manière, la navigation relative au terrain identifie où se trouve l’engin spatial et envoie ces informations à l’ordinateur de guidage et de contrôle, qui est chargé d’exécuter la trajectoire de vol vers la surface. L’ordinateur saura approximativement quand le vaisseau spatial devrait se rapprocher de sa cible, presque comme si on posait des miettes de fil puis les suivrait jusqu’à la destination finale.
Ce processus se poursuit jusqu’à environ quatre miles au-dessus de la surface.
Navigation laser
Connaître la position exacte d’un vaisseau spatial est essentiel pour les calculs nécessaires pour planifier et exécuter une descente motorisée pour un atterrissage précis. À mi-chemin de la descente, l’ordinateur active le lidar Doppler de navigation pour mesurer les mesures de vitesse et de distance qui ajoutent davantage aux informations de navigation précises provenant de la navigation relative au terrain. Lidar (détection et télémétrie de la lumière) fonctionne à peu près de la même manière qu’un radar mais utilise des ondes lumineuses au lieu d’ondes radio. Trois faisceaux laser, chacun aussi étroit qu’un crayon, sont pointés vers le sol. La lumière de ces faisceaux rebondit sur la surface, se réfléchissant vers le vaisseau spatial.
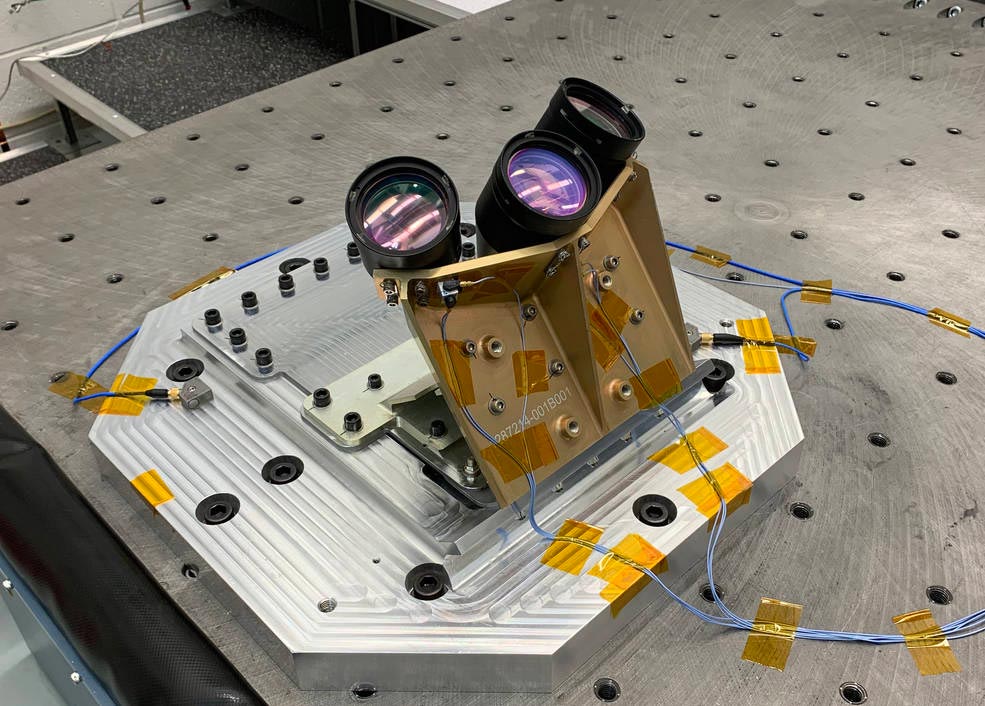
L’instrument lidar Doppler de navigation de la NASA est composé d’un châssis, contenant des composants électro-optiques et électroniques, et d’une tête optique avec trois télescopes. Crédit: NASA
Le temps de trajet et la longueur d’onde de cette lumière réfléchie sont utilisés pour calculer à quelle distance l’engin est du sol, dans quelle direction il se dirige et à quelle vitesse il se déplace. Ces calculs sont effectués 20 fois par seconde pour les trois faisceaux laser et introduits dans l’ordinateur de guidage.
Le lidar Doppler fonctionne avec succès sur Terre. Cependant, Farzin Amzajerdian, co-inventeur de la technologie et chercheur principal du Langley Research Center de la NASA à Hampton, en Virginie, est chargé de relever les défis de l’utilisation dans l’espace.
«Il y a encore des inconnues sur la quantité de signal provenant de la surface de la Lune et de Mars», a-t-il déclaré. Si le matériau au sol n’est pas très réfléchissant, le signal renvoyé aux capteurs sera plus faible. Mais Amzajerdian est convaincu que le lidar surclassera la technologie radar car la fréquence laser est d’un ordre de grandeur plus grande que les ondes radio, ce qui permet une bien plus grande précision et une détection plus efficace.
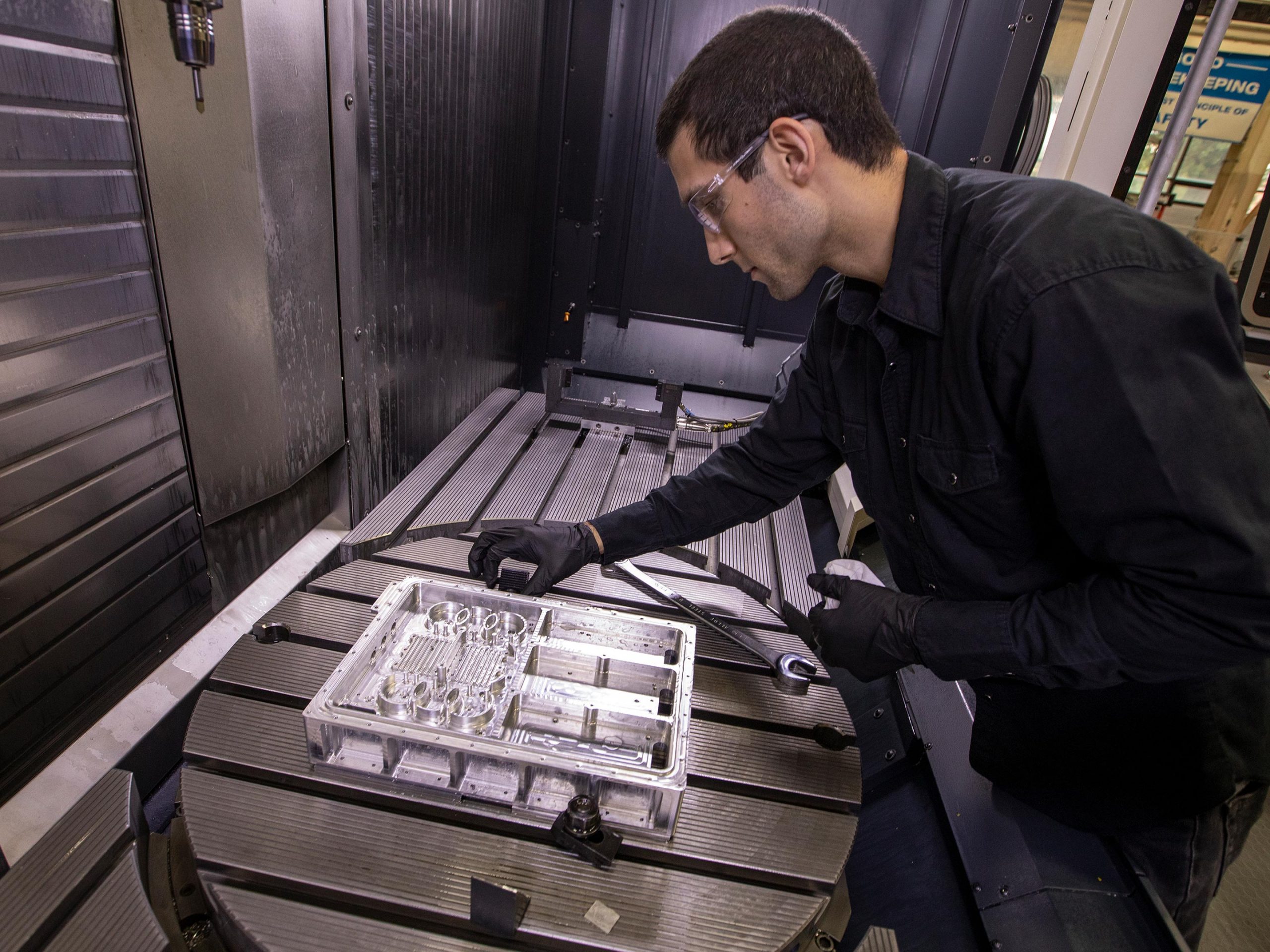
L’ingénieur de Langley John Savage inspecte une section de l’unité lidar Doppler de navigation après sa fabrication à partir d’un bloc de métal. Crédit: NASA / David C. Bowman
Le cheval de bataille responsable de la gestion de toutes ces données est l’ordinateur de descente et d’atterrissage. Les données de navigation des systèmes de capteurs sont transmises à des algorithmes embarqués, qui calculent de nouvelles voies pour un atterrissage précis.
Centrale informatique
L’ordinateur de descente et d’atterrissage synchronise les fonctions et la gestion des données des différents composants SPLICE. Il doit également s’intégrer parfaitement aux autres systèmes de tout vaisseau spatial. Ainsi, cette petite centrale informatique empêche les technologies d’atterrissage de précision de surcharger l’ordinateur de vol principal.
Les besoins informatiques identifiés dès le début ont clairement montré que les ordinateurs existants étaient inadéquats. Le processeur informatique haute performance de la NASA pour les vols spatiaux répondrait à la demande, mais il reste encore plusieurs années à être terminé. Une solution provisoire était nécessaire pour préparer SPLICE pour son premier test en vol de fusée suborbitale avec Blue Origin sur sa fusée New Shepard. Les données provenant des performances du nouvel ordinateur aideront à façonner son remplacement éventuel.
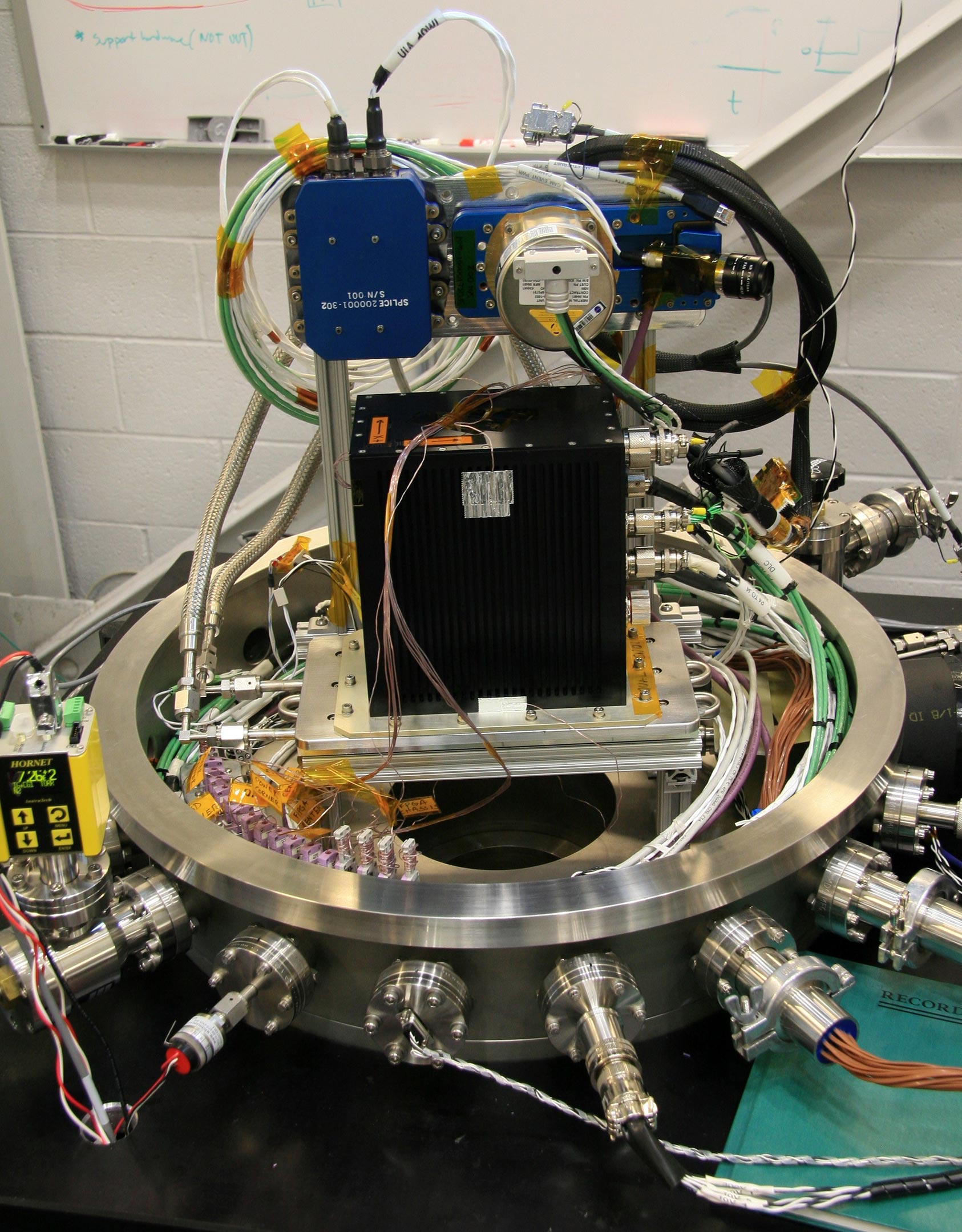
Matériel SPLICE en cours de préparation pour un test en chambre à vide. Trois des quatre principaux sous-systèmes de SPLICE auront leur premier vol d’essai intégré sur une fusée Blue Origin New Shepard. Crédit: NASA
John Carson, le responsable de l’intégration technique pour l’atterrissage de précision, a expliqué que «l’ordinateur de substitution a une technologie de traitement très similaire, qui informe à la fois la conception future de l’ordinateur à grande vitesse, ainsi que les futurs efforts d’intégration des ordinateurs de descente et d’atterrissage.»
Pour l’avenir, des missions de test comme celles-ci aideront à façonner des systèmes d’atterrissage sûrs pour les missions de la NASA et des fournisseurs commerciaux à la surface de la Lune et d’autres corps du système solaire.
«Atterrir en toute sécurité et avec précision sur un autre monde pose encore de nombreux défis», a déclaré Carson. «Il n’y a pas encore de technologie commerciale que vous pouvez acheter pour cela. Chaque future mission de surface pourrait utiliser cette capacité d’atterrissage de précision, donc la réunion de la NASA en a besoin maintenant. Et nous encourageons le transfert et l’utilisation avec nos partenaires industriels. »

“Introverti hardcore. Pionnier de la bière. Amoureux d’Internet. Analyste. Spécialiste de l’alimentation. Passionné de médias sociaux.”





